FU-MPC: Frontier- and Uncertainty-Aware Model Predictive Control for Efficient and Accurate UAV Exploration with Motorized LiDAR
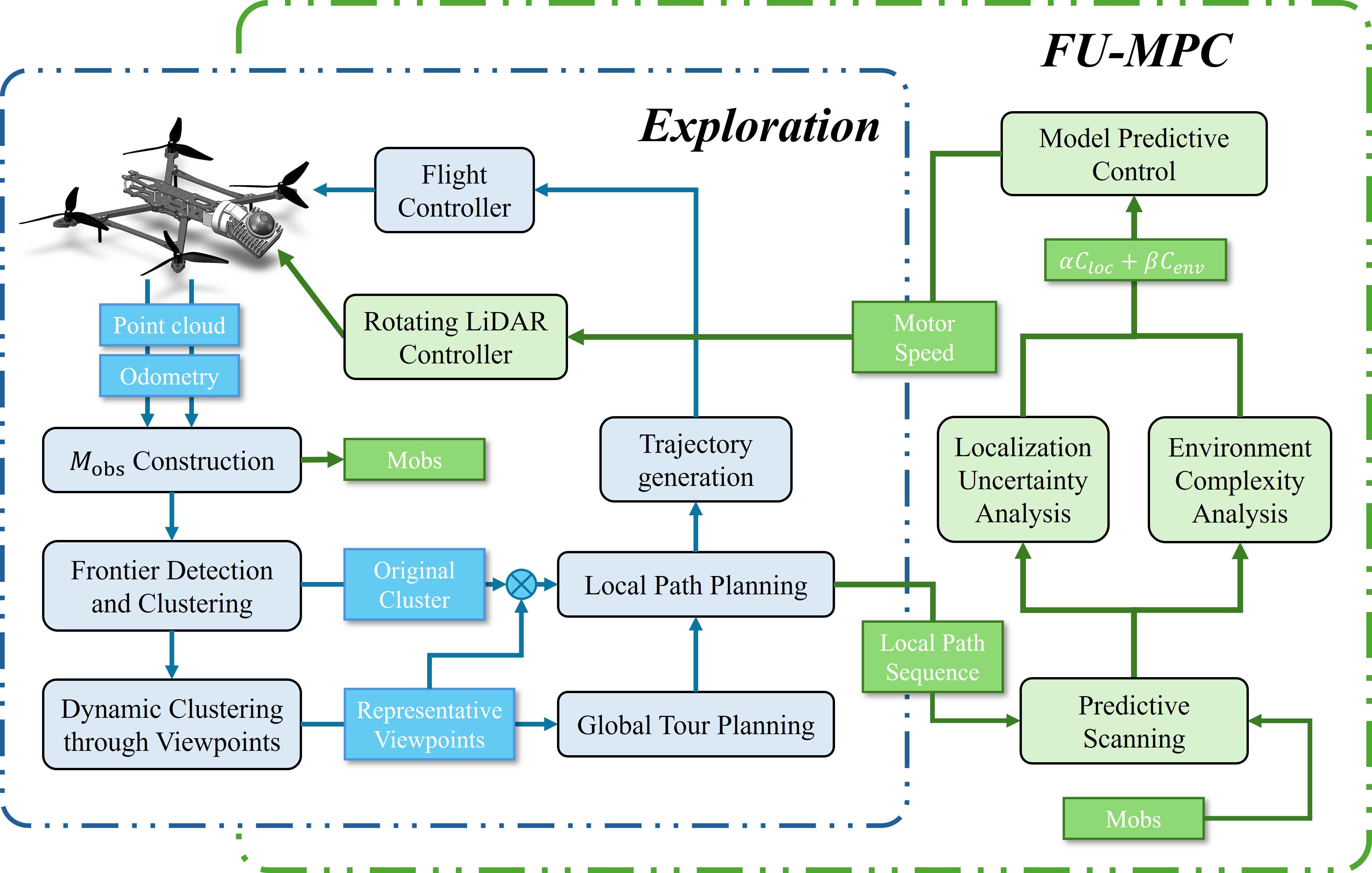
FU-MPC Overview
FU-MPC: Frontier- and Uncertainty-Aware Model Predictive Control for Efficient and Accurate UAV Exploration with Motorized LiDAR.
Abstract
Efficient UAV exploration in unknown environments requires both rapid coverage expansion and accurate SLAM. Although motorized rotating LiDARs provide UAVs with an additional actuation channel for shaping sensing geometry online, dedicated control algorithms that explicitly exploit motorized LiDAR motion for autonomous exploration remain largely unexplored.
This paper treats a motorized LiDAR as a controllable sensor and proposes FU-MPC, a Frontier- and Uncertainty-Aware Model Predictive Control framework that regulates LiDAR rotation speed in closed loop to balance exploration progress and localization quality.
FU-MPC introduces two predictive objectives that are amenable to online evaluation: a frontier-gain term estimated from the future swept volume, and a direction-dependent uncertainty metric derived from local geometric constraints using Fisher information and an A-optimality criterion. To satisfy onboard real-time constraints, piecewise-linear surrogates approximate the utility field, enabling high-rate receding-horizon optimization under hardware limits.
We implement a tightly time-synchronized UAV platform with an independently actuated rotating LiDAR module and show that FU-MPC improves exploration efficiency while maintaining robust SLAM performance in complex environments, compared with fixed-pattern scanning and uncertainty-only baselines.